Filter Clogging
During the filtration process, particles are deposited on the structure. This is reflected in the simulation by changing the 3D structure model after each batch. The new structure consists of the filter material plus the deposited particles. Large particles, that are resolved in the voxel grid, will simply add solid grid cells to the structure. But many particles have sizes comparable to the voxel length or are even smaller - in such a case they will not fill a grid cell completely. Therefore, the simulation has to track the (dust filled) Volume Fractions of each voxel and model flow and filtration properties according to the state of the voxel.
FilterDict offers different models to handle this:
- In Resolved simulations, all voxels are treated as either empty or solid for flow and filtration, and the volume fractions are simply used to decide whether a voxel is empty or solid.
- In Unresolved simulations, partially filled voxels are modeled as porous voxels for flow and filtration. A Flow Resistivity model determines how the flow resistivity depends on the locally deposited volume fraction.
In the examples below, the initial structure consists of empty pores (white in the illustrations below) and full solid (red) voxels. During the filtration process, particles (grey) are caught in the filter. In Filter Element simulations, the original structure can already contain porous voxels.
Resolved Simulations
After each batch, the voxels with caught particles are analyzed. If the volume fraction in a voxel is higher than the Volume Fraction Threshold (default is 0.5), the voxel is set to solid. Otherwise, the voxel is considered as pore.
The volume fractions from succeeding batches are added. Under certain circumstances, the volume fraction of a voxel might exceed 1 (e.g., 1.1 as in the example below). In the following two figures, the effect of the choice of the Volume Fraction Threshold is shown. A value of 0.5 will usually lead to more realistic results than a value of 1.0.
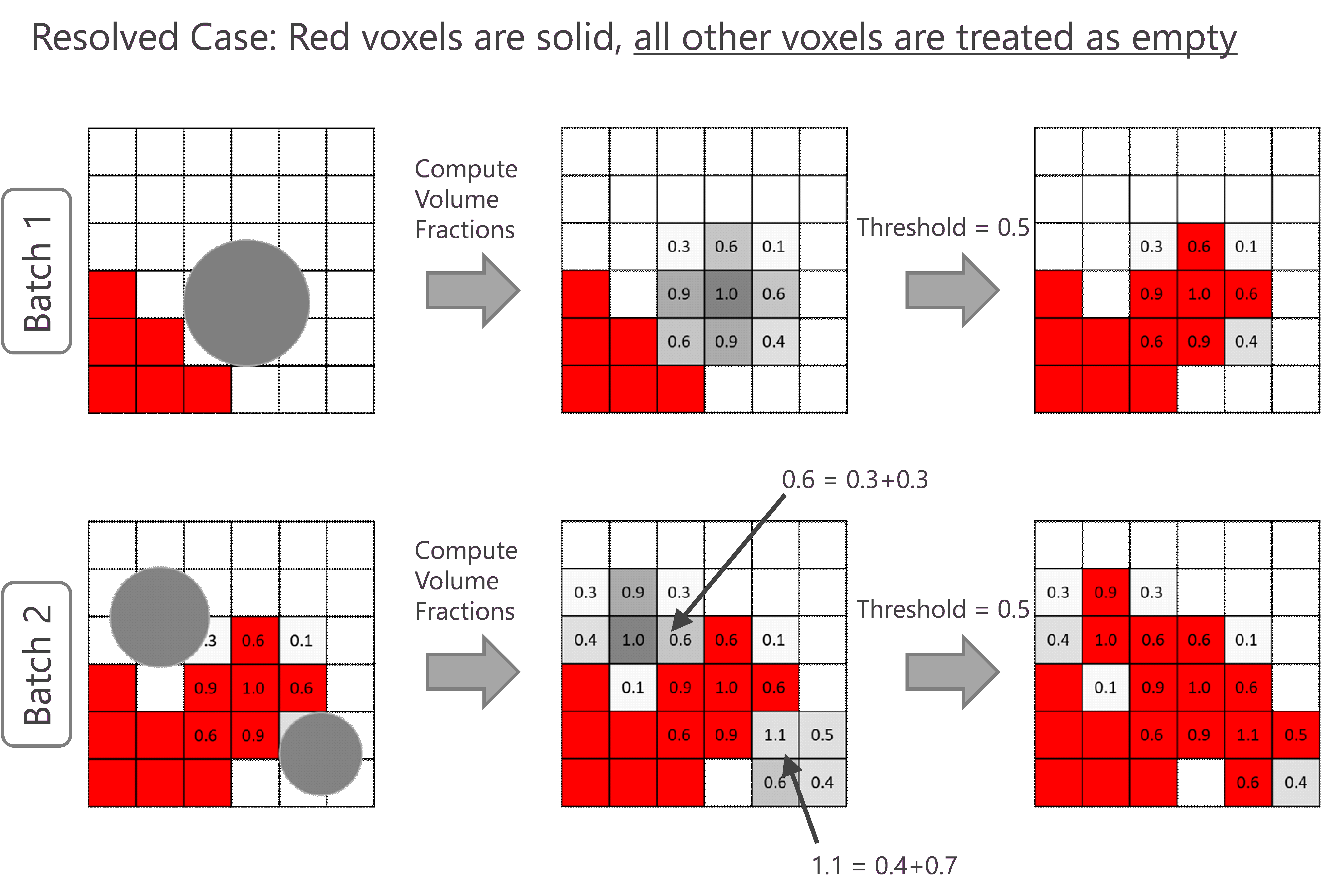
Example: Volume Fraction Threshold = 0.5
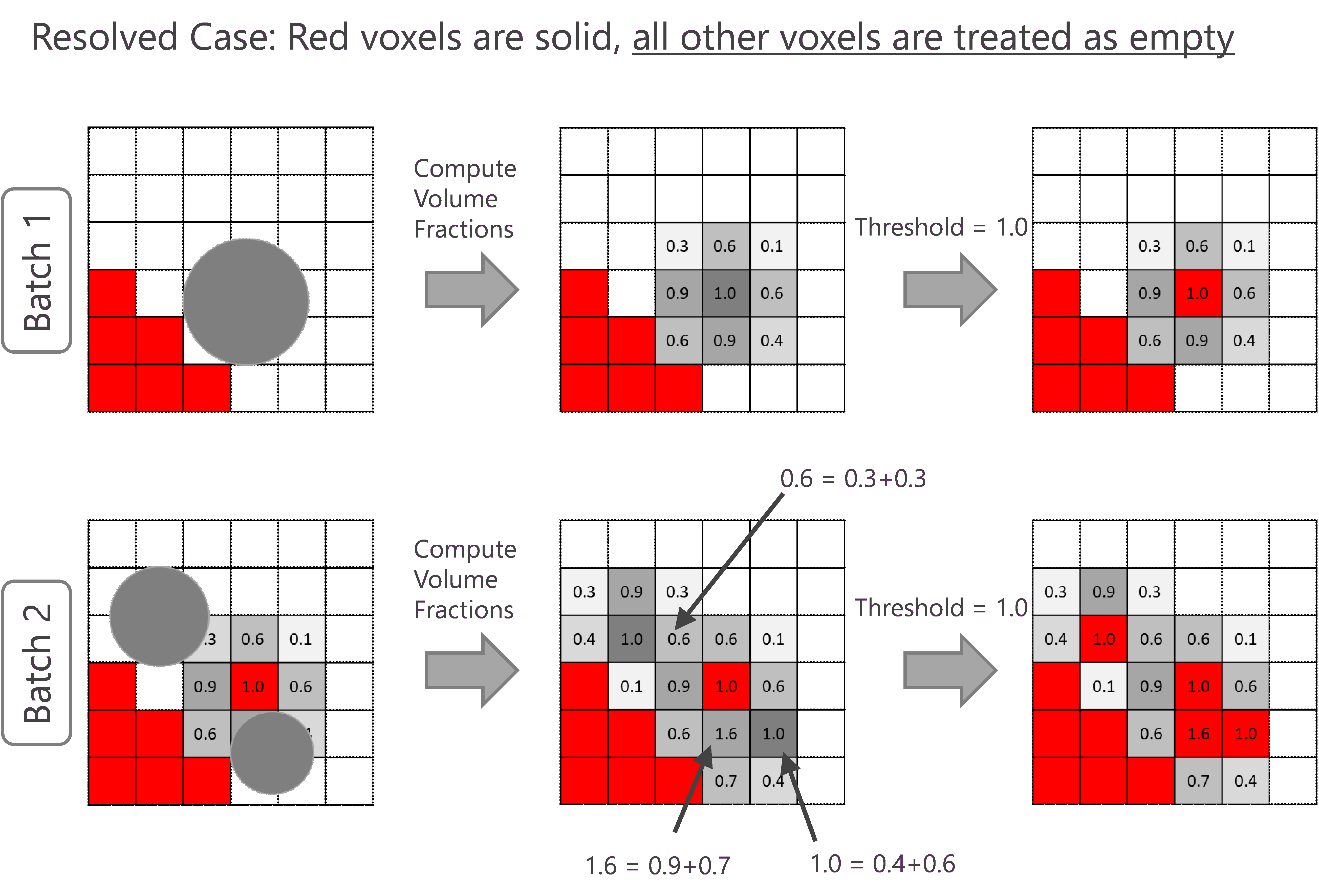
Example: Volume Fraction Threshold = 1.0
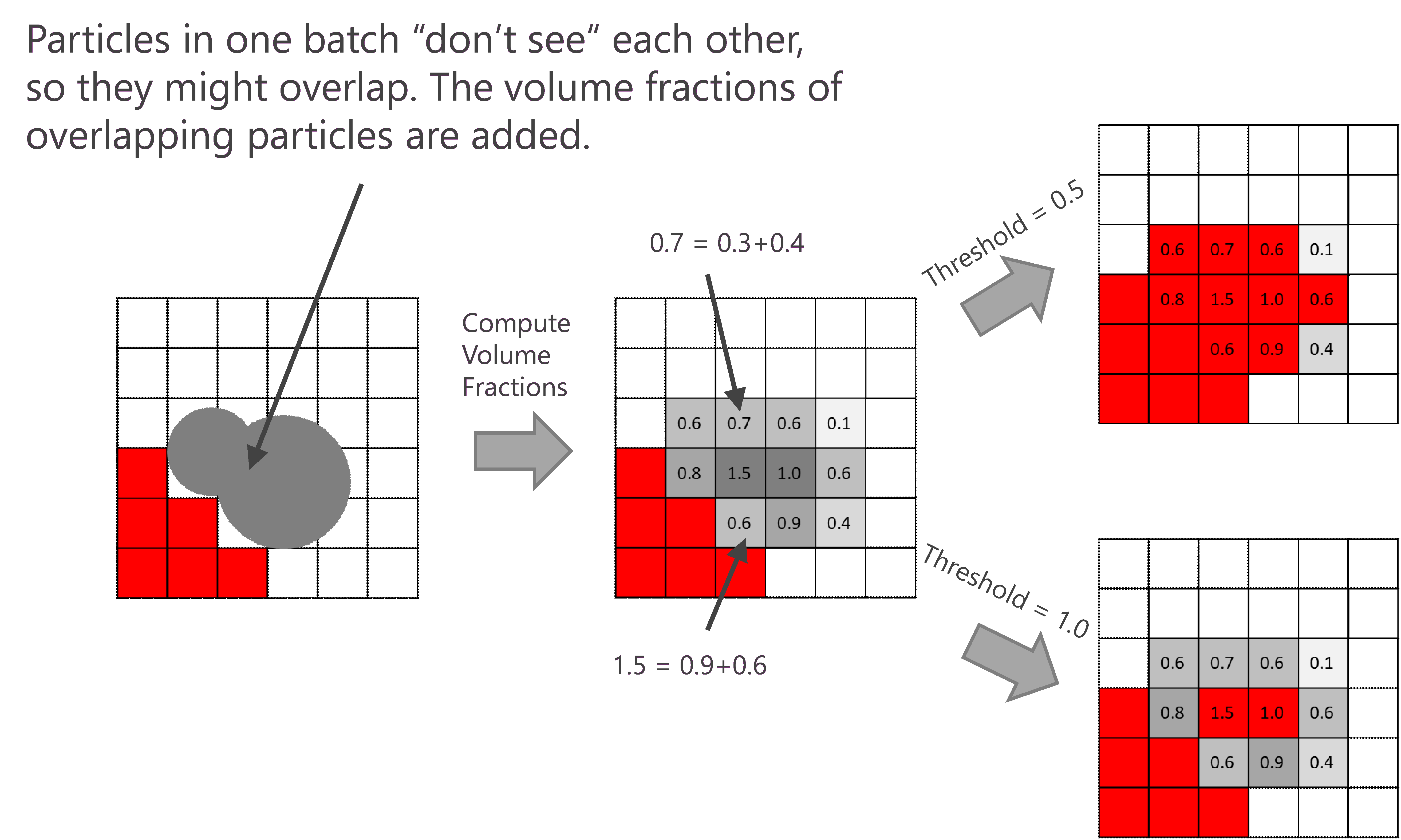
During one batch, interaction between particles is not simulated. Thus, it is possible that particles from one batch overlap each other. A measure for this effect is the Volume Loss. A high value indicates that the number of overlapping particles is high. To avoid this, decrease the number of particles per batch.
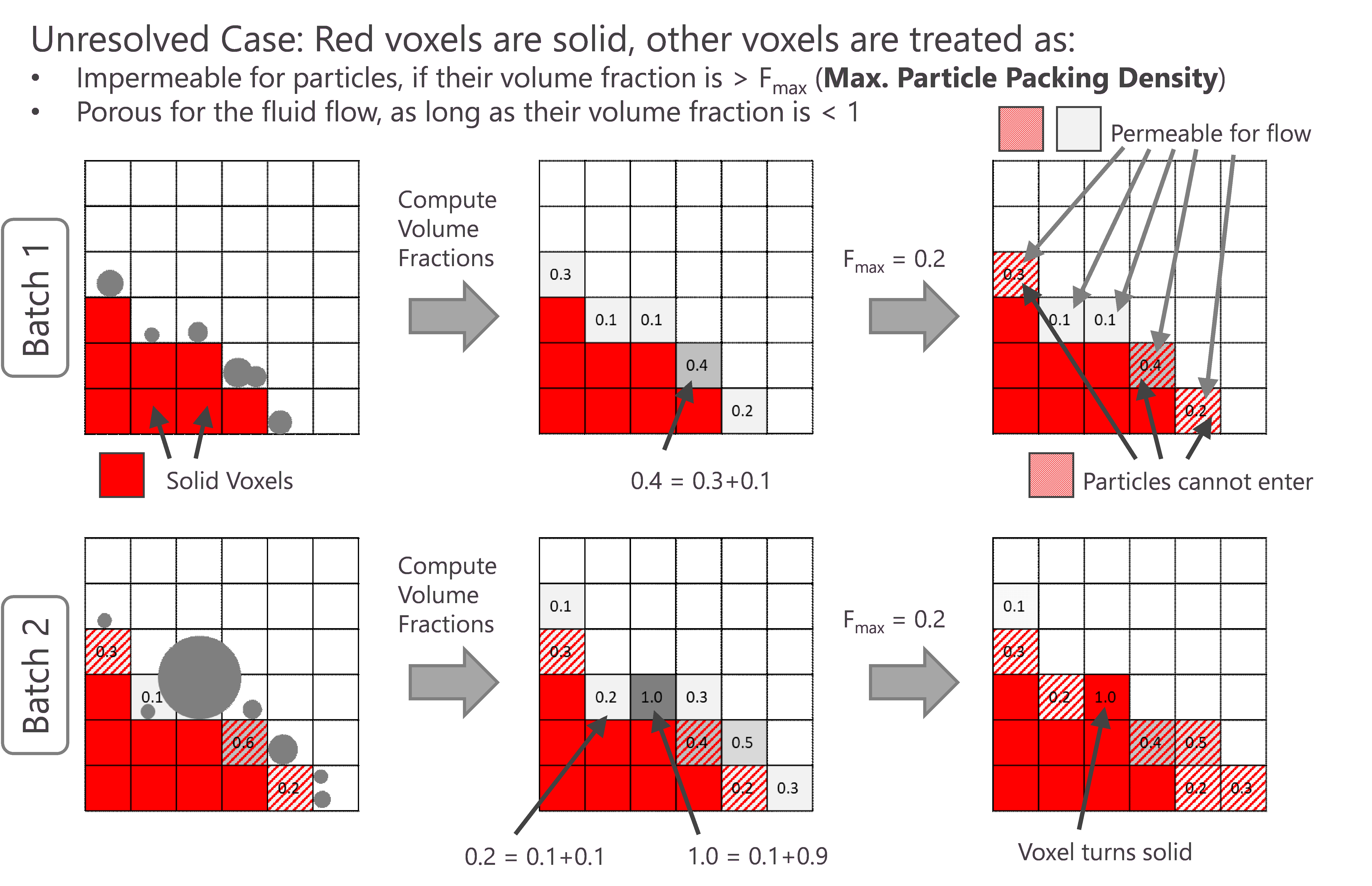
Unresolved Simulations
In unresolved simulations, voxels can be porous. These can be voxels with caught particles or a porous filter material. Porous voxels have a flow resistivity depending on their volume fraction. Particles can only enter a voxel when its volume fraction is smaller than the Maximal Particle Packing Density Fmax.
Therefore, the Navier-Stokes-Brinkman equations (237) and (238) have to be used to determine the flow through the resulting structure. The flow resistivity is given as a function , where denotes the local solid volume fraction inside a voxel. Different options are available for the user to describe this function in the Constituent Materials tab.